



Содержание
Перейти к:
https://doi.org/10.35266/1999-7604-2024-4-3
Перейти к:
Целью представленной работы является разработка и внедрение эффективной и доступной по цене автоматической системы видеонаблюдения, способной работать в режиме реального времени и интегрироваться с существующими системами видеонаблюдения. Представленный метод включает в себя анализ существующих на рынке решений, выбор и обучение модели глубокого обучения для обнаружения предметов, разработку пользовательских интерфейсов, контейнеризацию приложения и тестирование системы в реальных условиях. Результатом работы стала система, способная обнаруживать интересующие объекты в режиме реального времени с помощью нейронных сетей и уведомлять пользователя об обнаружении. Система предназначена для использования в общественных местах, таких как аэропорты, вокзалы, школы и другие учреждения, требующие повышенной безопасности.
Василенко Н.Е., Медведева Н.А. Нейросетевая система видеонаблюдения. Вестник кибернетики. 2024;23(4):25-33. https://doi.org/10.35266/1999-7604-2024-4-3
Vasilenko N.E., Medvedeva N.A. Neural network surveillance system. Proceedings in Cybernetics. 2024;23(4):25-33. (In Russ.) https://doi.org/10.35266/1999-7604-2024-4-3
В настоящее время разработка видеосистем автоматического обнаружения предметов, входящих в область интересов, имеет критическое значение в контексте обеспечения общественной безопасности [1, 2]. Такие системы обещают значительно улучшить реакцию на потенциальные угрозы и инциденты, предотвращая их возникновение или минимизируя их последствия. Однако существует ряд проблем, связанных с трудностями внедрения, установки, конфигурации и обслуживания подобных систем.
При разработке системы использовались современные методы машинного обучения и искусственного интеллекта, подходы к созданию веб- и десктоп-приложений, а также данные о существующих решениях на рынке. Были проанализированы различные подходы к видеоаналитике и детектированию объектов, такие как алгоритм YOLO и методы сверточных нейронных сетей.
Актуальность работы обусловлена ростом глобальных угроз, таких как преступность и несанкционированные действия, а также возрастающими требованиями к общественной и частной безопасности. Интеграция современных алгоритмов глубокого обучения в систему, способную работать в реальном времени и предоставлять высокую точность обнаружения обещает дать толчок в развитии, как таких систем, так и всей сферы безопасности в целом.
Существуют решения, разработанные такими компаниями, как Videonet, ZeroEyes, Athena Security, Actuate и NtechLab, которые также направлены на улучшение безопасности с использованием видеоаналитики и искусственного интеллекта.
После анализа этих решений можно выделить ряд их недостатков:
При проектировании системы была выбрана модель YOLO («You Only Look Once») [3–6] для задачи обнаружения предметов в реальном времени, что обусловлено рядом причин (рис. 1).
Прежде всего, эта модель представляет собой эффективную архитектуру нейронной сети, в которой входное изображение разбивается на сетку, и каждая ячейка сетки отвечает за обнаружение объектов в своей области.
Параметры этих ячеек (рис. 2) в виде векторов [7] являются выходным результатом работы модели, в основе которой лежит принцип сверточной нейронной сети.
Для получения предсказаний модели, изображению требуется пройти через нее всего один раз. Это отличает алгоритм YOLO от других алгоритмов обнаружения объектов и позволяет выполнять инференс с высокой скоростью (рис. 3), что очень важно для системы, работающей в режиме реального времени.
Установка необходимых библиотек, импортирование модели, установка датасета, обучение модели и экспорт файла весов производились в среде Google Colab с подключенным Google хранилищем для сохранения файловой структуры проекта (рис. 4–5) [8].
Параметры обучения (рис. 6) подбирались экспериментальным путем для выведения наилучшей точности модели. Крайний вариант модели обучался на протяжении 30-ти эпох, с количеством образцов данных, обрабатываемых нейронной сетью за одну итерацию, равную 16-ти, и с использованием более 4-х Гб видеопамяти.
При конечном инференсе (рис. 7–9) модель показала 78,5 % средней точности, что, относительно затраченных ресурсов, является хорошим показателем.
Для создания системы автоматического оповещения пользователя об обнаружении нежелательных предметов в реальном времени использовались современные технологии для реализации серверной и клиентской части программного обеспечения:
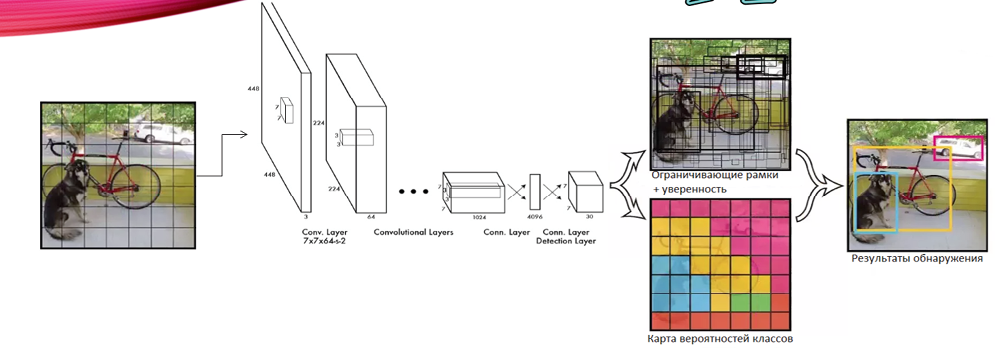
Рис. 1. Принцип работы алгоритма YOLO
Примечание: составлено авторами по [3].
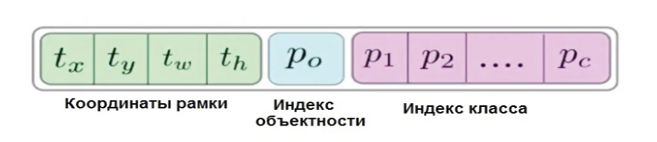
Рис. 2. Параметры ячеек изображения
Примечание: составлено авторами по [3].
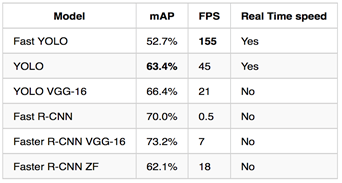
Рис. 3. Сравнение скорости и производительности моделей, обученных с наборами данных PASCAL VOC 2007 и 2012 гг.
Примечание: составлено авторами.
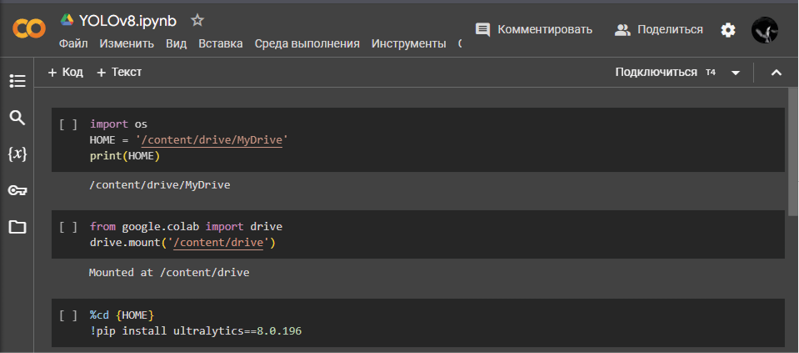
Рис. 4. Подключение Google хранилища и установка библиотеки для работы с моделями ИИ
Примечание: составлено авторами.
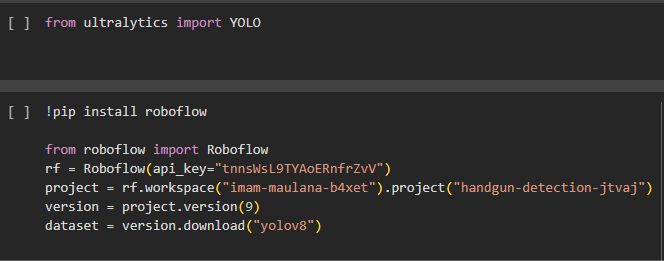
Рис. 5. Импорт модели YOLO и установка датасета с помощью библиотеки Roboflow
Примечание: составлено авторами.
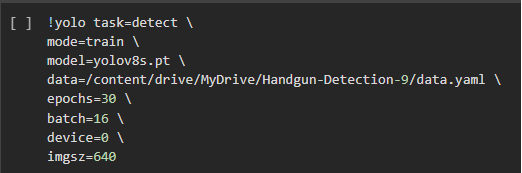
Рис. 6. Метод обучения модели на установленном датасете с определенными параметрами обучения
Примечание: составлено авторами.
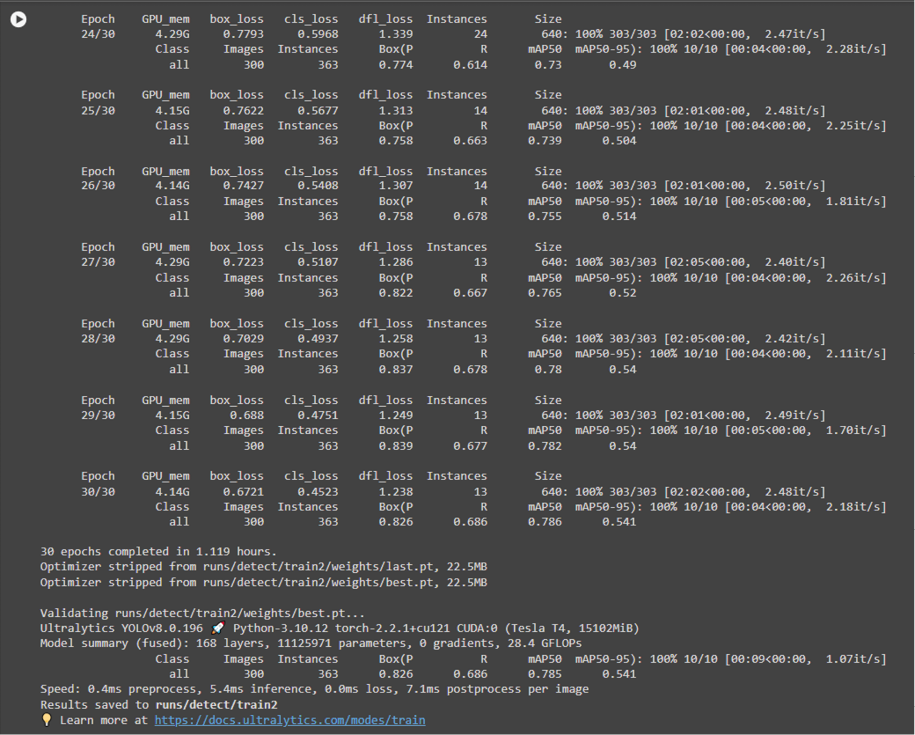
Рис. 7. Зафиксированные последние эпохи обучения модели с выводом результатов
Примечание: составлено авторами.

Рис. 8. Экспорт файла весов в необходимый для дальнейшей работы формат
Примечание: составлено авторами.
Рис. 9. Каталог с файлами весов
Примечание: составлено авторами.
В файле «desktop.py» находится код, интерпретация которого (рис. 10) создаст объект «QApplication», представляющий собой основное окно приложения PyQt5. После чего создастся экземпляр «LoginWindow» (окно входа), установится иконка окна и оно отобразится (рис. 11).
Откроется следующее окно. Если пользователь не регистрировался ранее, то он может это сделать нажатием кнопки «Зарегистрироваться» (рис. 12).
Это действие откроет веб-страницу с разделом регистрации, что позволит пользователю зарегистрироваться (рис. 13).
После регистрации пользователь может войти в личный кабинет. Теперь, после вноса пользователя в базу данных, можно успешно войти систему локально и указать местоположение камеры, с помощью которой планируется проводить мониторинг (рис. 14–15).
Запустив мониторинг, перед пользователем появится окно мониторинга, где изображение будет передаваться в реальном времени с указанной камеры (рис. 16).
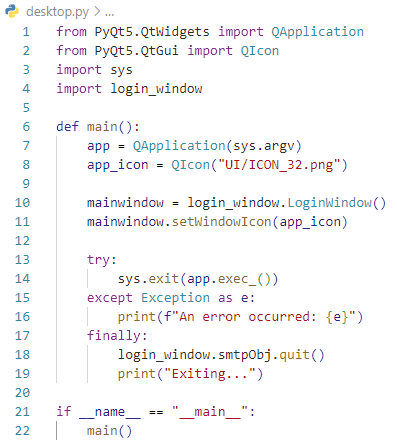
Рис. 10. Содержимое файла desktop.py
Примечание: составлено авторами.

Рис. 11. Команда запуска приложения пользователя
Примечание: составлено авторами.
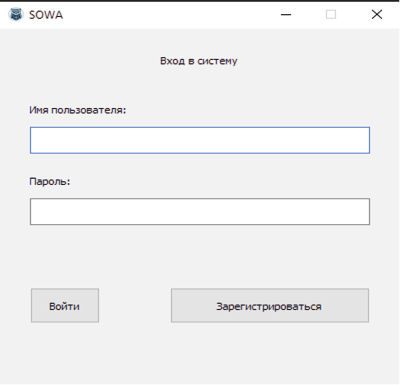
Рис. 12. Окно входа
Примечание: составлено авторами.
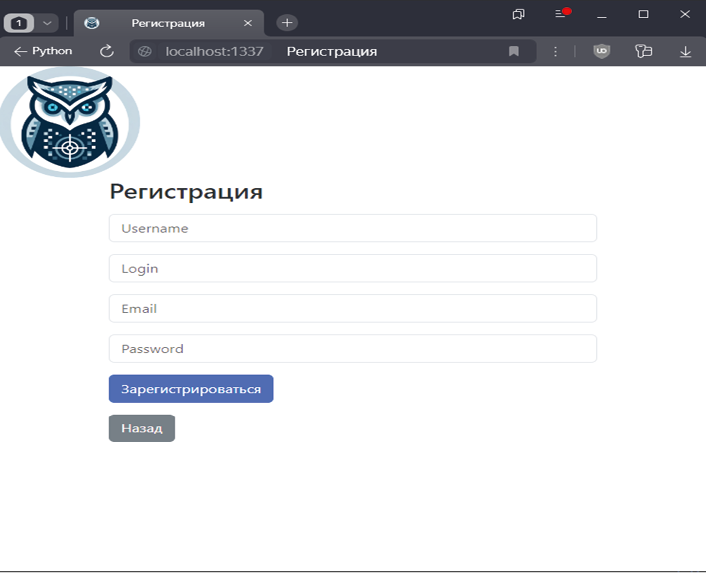
Рис. 13. Страница регистрации
Примечание: составлено авторами.
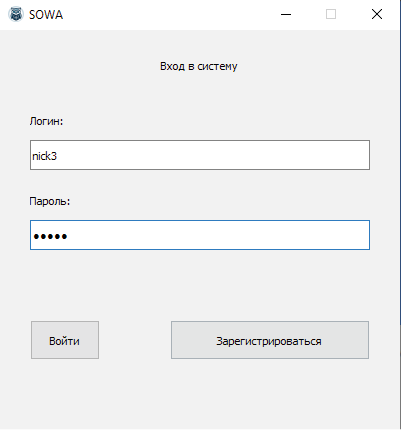
Рис. 14. Вход в систему
Примечание: составлено авторами.
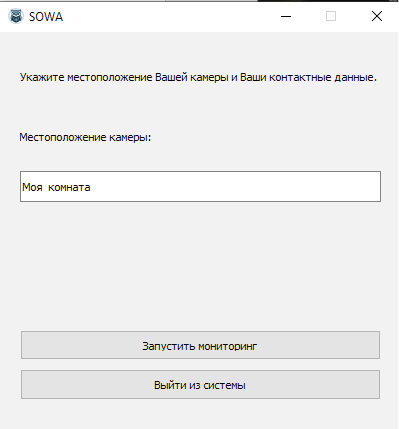
Рис. 15. Заполнение полей окна настройки
Примечание: составлено авторами.
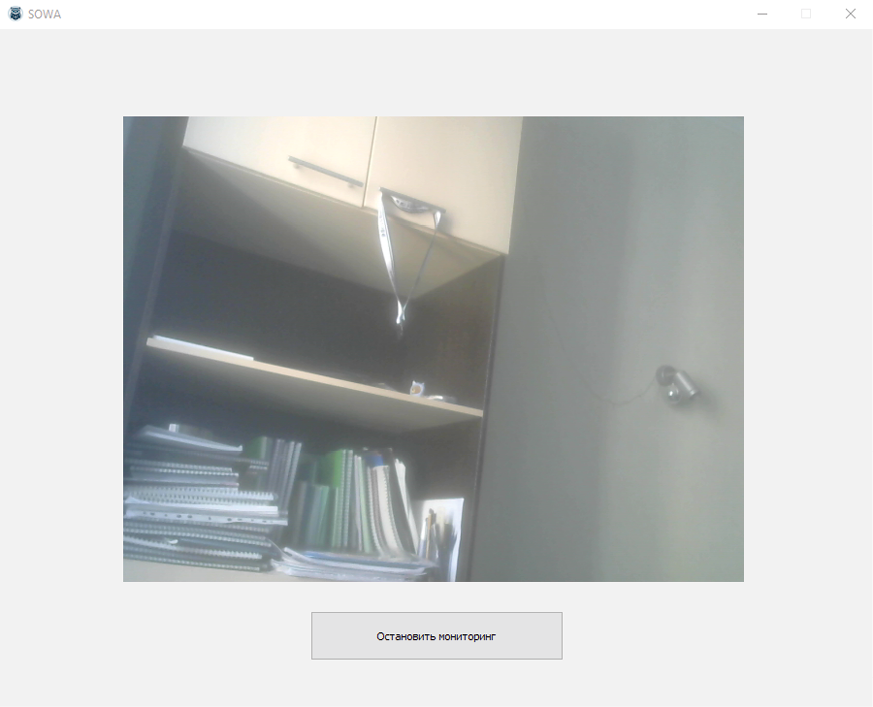
Рис. 16. Процесс мониторинга
Примечание: составлено авторами.
В рамках научно-исследовательской работы была разработана и реализована интегрированная система, которая включает в себя следующие основные компоненты:
Видеосистема автоматического оповещения пользователя об обнаружении предметов повышенного риска в реальном времени является важной частью обеспечения как общественной, так и персональной безопасности.
1. Ларина Ю. Событийный видеоконтроль // Безопасность. Достоверность. Информация. 2009. № 83. С. 28–40.
2. VideoNet PSIM – интеллектуальная система безопасности. URL: https://www.videonet.ru/ (дата обращения: 05.05.2024).
3. Распознавание образов с помощью искусственного интеллекта. URL: https://habr.com/ru/articles/709432/ (дата обращения: 05.05.2024).
4. YOLO: You Only Look Once – Real Time Object Detection – GeeksforGeeks. URL: https://www.geeks-forgeeks.org/yolo-you-only-look-once-real-time-object-detection/ (дата обращения: 05.05.2024).
5. Real-Time Object Identification Through Convolution Neural Network Based on YOLO Algorithm. URL: https://www.sciencepg.com/article/10.11648/j.mcs.20230805.11 (дата обращения: 05.05.2024).
6. YOLO with adaptive frame control for real-time object detection applications. URL: https://link.springer.com/article/10.1007/s11042-021-11480-0 (дата обращения: 05.05.2024).
7. D_0.06 YOLO – Head. URL: https://junha1125.github.io/blog/artificial-intelligence/2020-08-18-YOLO/ (дата обращения: 05.05.2024).
8. How to Train YOLOv8 Object Detection on a Custom Data- set. URL: https://blog.robofl ow.com/how-to-train-yolov8-on-a-custom-dataset/ (дата обращения: 05.05.2024).
магистрант
старший преподаватель
Василенко Н.Е., Медведева Н.А. Нейросетевая система видеонаблюдения. Вестник кибернетики. 2024;23(4):25-33. https://doi.org/10.35266/1999-7604-2024-4-3
Vasilenko N.E., Medvedeva N.A. Neural network surveillance system. Proceedings in Cybernetics. 2024;23(4):25-33. (In Russ.) https://doi.org/10.35266/1999-7604-2024-4-3
628412, Ханты-Мансийский автономный округ – Югра,
г. Сургут, пр. Ленина, 1.
БУ ВО ХМАО-Югры «Сургутский государственный университет»
Email: science.jоurnals@surgu.ru











