


Содержание
Перейти к:
https://doi.org/10.35266/1999-7604-2024-4-8
Перейти к:
Получены соотношения по расчету уровня сигнала, рассеянного пластиковым объектом при подповерхностном радиолокационном зондировании. Приведены радиолокационные изображения пластиковых дисков, заглубленных в песок. Выполнен анализ связи радиолокационного контраста изображения пластикового диска с энергетическим потенциалом системы. Раскрыта процедура радиолокационного измерения ориентации трубы, заглубленной в подповерхностную среду. Описана конструкция радиолокатора подповерхностного зондирования с резонансной компрессией сигналов.
Шошин Е.Л. Подповерхностное радиолокационное зондирование пластиковых объектов. Вестник кибернетики. 2024;23(4):83–91. https://doi.org/10.35266/1999-7604-2024-4-8
Shoshin E.L. Subsurface radar sensing of plastic objects. Proceedings in Cybernetics. 2024;23(4):83–91. (In Russ.) https://doi.org/10.35266/1999-7604-2024-4-8
Георадарные исследования, проводимые на территории РФ, направлены на изучение состояния дорожного покрытия, инженерных сетей подземной коммуникации, строительных блоков и конструкций и др. [1–3]. Заглубленные в грунт металлические предметы и включения в составе бетонных конструкций обладают высокой электропроводностью, и при подповерхностном радиолокационном зондировании они уверенно обнаруживаются оператором георадарной съемки. Пластиковые объекты, заглубленные в грунт, имеют малую эффективную поверхность рассеяния (ЭПР), что затрудняет их обнаружение методом подповерхностного радиолокационного зондирования [4].
Целью исследования является анализ характеристик рассеяния пластиковых объектов, связи энергетического потенциала георадара и радиолокационного контраста изображений пластиковых дисков, процедуры радиолокационного измерения ориентации заглубленных труб в подповерхностной среде и разработка радиолокатора подповерхностного зондирования с резонансной компрессией поляризационно-модулированных радиоимпульсов.
Пластиковые объекты вследствие своей почти нулевой электропроводности могут быть отнесены к категории диэлектриков. ЭПР пластикового объекта будет зависеть от его формы, диэлектрической проницаемости (e) и длины волны облучающего сигнала (l).
При размерах пластиковых объектов, сравнимых с длиной волны облучающего сигнала, расчет ЭПР (s) выполняют, используя численные методы анализа. На рис. 1 приведены рассчитанные в FEKO (Finite Element Method во Microwave Engineering – метод конечных элементов в микроволновой технике) угловые зависимости ЭПР пластиковых дисков (ε = 5, tgδ = 0,002) диаметром 15 см (1) и 30 см (2) при λ = 17,6 см.
При подповерхностном радиолокационном зондировании на формирование изображения заглубленного объекта влияют направленные свойства передающей и приемной антенн, приводящие к формированию годографов в форме гиперболы. Реализация алгоритма синтеза апертуры позволяет локализовать изображение заглубленного пластикового объекта благодаря трансформации энергии гиперболических участков в энергию вершины годографа (рис. 2).
Подповерхностное радиолокационное зондирование плоского пластикового объекта приводит к отражению с коэффициентом Френеля (1), вызванному отличием диэлектрических проницаемостей пластикового объекта (ε1) и подповерхностной среды (ε):
 (1)
(1)
Мощность сигнала, рассеянного пластиковым объектом, будет равна (2):
 (2)
(2)
где Pпер – мощность передатчика, Gпер и Gпр – коэффициенты усиления передающей и приемной антенны, ηпер и ηпр – коэффициенты полезного действия антенн, R1 и R2 – расстояние от передающей антенны до объекта и от объекта до приемной антенны, V1 и V2 – поляризационные и энергетические потери (3),
 (3)
(3)
kp – коэффициент отражения с учетом условий измерения ЭПР.
При облучении пластикового объекта, мощность рассеянного сигнала будет зависеть от диэлектрического скачка на границе пластик-подповерхностная среда. На рис. 3 приведена угловая зависимость  соответствующая диэлектрическому скачку на границе пластикового диска диаметром 30 см (ε1 = 5) и песка (ε = 4,7).
соответствующая диэлектрическому скачку на границе пластикового диска диаметром 30 см (ε1 = 5) и песка (ε = 4,7).
Радиолокационный контраст изображений
Радиолокационные изображения подповерхностных сред и объектов демонстрируют контраст, зависящий от ряда параметров: ЭПР, длины волны облучающего сигнала, глубины залегания, погонного ослабления, коэффициентов усиления антенн и мощности излученного сигнала (4). На рис. 4 приведены радиолокационные изображения пластикового диска диаметром 15 см, полученные при георадарном профилировании с поверхности песка на частоте 1700 МГц для различных значений энергетического потенциала:
p, дБ = Pпер, дБм – Pпр, дБм + (Gпер + Gпр), дБ + (ηпер + ηпр), дБ.(4)
Радиолокационный контраст может быть оценен через отношение (Q) усредненного уровня сигнала от пластикового объекта I1, заключенного в область интереса на изображении, к усредненному значению сигнала от подповерхностной среды I2. Энергетический потенциал р георадара ОКО 2 с учетом усиления антенн может быть рассчитан по формуле (5) и (6):
р, дБ =134 + M, дБ,(5)
где
М, дБ = (Gпер + Gпр), дБ + (ηпер + ηпр), дБ.(6)
В табл. 1 приведены результаты измерения радиолокационного контраста изображения пластикового диска, заглубленного в песок на глубину 15 см, при различном энергетическом потенциале георадара.
Связь радиолокационного контраста QL изображения пластикового диска на глубине залегания L и погонным затуханием подповерхностной среды Г с энергетическим потенциалом имеет вид (7):
QL, дБ = f(р(дБ) + Z(дБ)),(7)
где f(р(дБ) + Z(дБ)) = Q из табл. 2 при (8).
Z = M(дБ) – 2Г(дБ/м) L(м).(8)
Радиолокационное измерение ориентации труб в подповерхностной среде
При подповерхностном радиолокационном зондировании заглубленных труб важно уметь определять направление пересечения объекта и его типоразмер (диаметр). Для достижения этого рассмотрим процедуру профилирования участка местности георадаром, работающим в режиме радиолокационного зондирования поляризационно-модулированными сигналами при помощи излучателей Вивальди. В качестве таких излучателей могут использоваться антенны антиподального типа с диапазоном рабочих частот 500–700 МГц [5].
В зависимости от угла g (рис. 5) излучатели 1 и 2 будут пересекать заглубленную трубу с углами 45° – g и 45° + g, а с излучателей 3 и 4 будут сниматься рассеянные сигналы ортогональных линейных поляризаций с последующим формированием радарограмм.
Протяженность радиолокационных изображений, полученных под различными углами пересечения трубы, будет разной (9):
 (9)
(9)
где d – диаметр трубы.
На рис. 6 приведены примеры георадарного профилирования заглубленной в песок трубы под разными углами, полученные путем моделирования в gprMax (Ground-Penetrating Radar Max – Радар подповерхностного зондирования – Максимум) [6].
Угол γ находится из отношения L1 и L2 (10) и (11):
При γ = 0 радиолокационные изображения будут одинаковой протяженности на обоих профилях.
Рассмотренная процедура измерения ориентации не накладывает ограничений на физические свойства труб, которые могут быть изготовлены из металла, керамики, пластика и т.д. Измерение поперечной ЭПР трубы дополнительно требует проведения внешней калибровки и позволяет определить типоразмер (диаметр) [7].
Радиолокатор подповерхностного зондирования с коаксиальной резонансной компрессией поляризационно-модулированных радиоимпульсов
С целью увеличения энергетического потенциала рассмотрим реализацию георадара с коаксиальной резонансной компрессией поляризационно-модулированных радиоимпульсов. На рис. 7 приведена схема системы компрессии, в которой переключение режима накопления в режим вывода СВЧ-энергии происходит за счет быстрой перестройки укорачивающей емкости, образованной разрывом центрального проводника коаксиального волновода при развитии в зазоре СВЧ-разряда и приводящей к инверсии фазы выходной волны [8].
В табл. 2 приведены параметры импульсов излучения коаксиальными резонансными компрессорами.
Проведенные исследования резонансных компрессоров коаксиального типа показывают возможность реализации радиолокаторов подповерхностного зондирования, способные формировать импульсы наносекундной длительности с пиковой мощностью 100 кВт…1,6 МВт в дециметровом диапазоне частот. На рис. 8 приведена структурная схема радиолокатора подповерхностного зондирования с резонансной компрессией излученных сигналов.
При работе подповерхностного радиолокатора УСУ формирует сигналы запуска генератора СВЧ-импульсов, стробоскопических преобразователей и электронных ключей в моменты времени t = nT (n = 1, 2, 3...), где Т – период следования синхроимпульсов. Резонансные компрессоры в моменты времени t = 2nT и t = (2n – 1) T (n = 1, 2, 3…) попеременно формируют мощные высокочастотные радиоимпульсы. Антенная система, образованная из излучателей Вивальди (рис. 5), будет формировать поляризационно-модулированные сигналы в продольном и поперечном направлениях облучения подповерхностной среды. При приеме электронные ключи и высокочастотные усилители пропускают радиосигналы, сформированные приемными антеннами и пришедшие с определенной временной задержкой, которая задает рабочий диапазон глубин радиолокатора. Стробоскопические приемники преобразуют принятые сигналы в выходные радиоимпульсы, форма и временной масштаб которых позволяют выполнить аналого-цифровое преобразование. Цифровая обработка сигналов, выполняемая радиолокатором для первого и второго приемного каналов, включает в себя построение радиолокационных изображений, что позволяет реализовать процедуру измерения ориентации заглубленных труб в подповерхностной среде, рассмотренную выше.
Проведем расчет глубины зондирования пластиковых труб радиолокатором подповерхностного зондирования с коаксиальной резонансной компрессией излученных сигналов (12). Энергетический потенциал радиолокатора, необходимый для подповерхностного зондирования пластикового объекта с ЭПР s на глубину x, равен [3]:
 (12)
(12)
где H – высота подвеса радиолокатора относительно земли; Г – погонное затухание в среде; k1 – коэффициент отражения сигнала от границы воздух–грунт, рассчитываемый по формуле (13).
 (13)
(13)
На рис. 9 приведены результаты расчета энергетического потенциала, необходимого для радиолокационного подповерхностного зондирования пластиковой трубы диаметром 30 см с борта воздушного носителя (1) и поверхности земли (2) при λ = 17,6 cм; H = 400 м; Г = 23 дБ/м; Gпер = Gпр = 6.
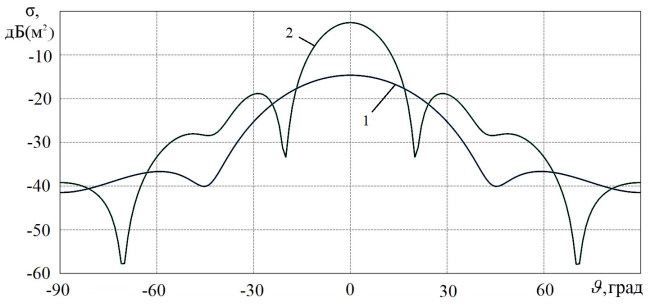
Рис. 1. Угловая зависимость ЭПР пластиковых дисков
Примечание: составлено автором.

Рис. 2. Радиолокационное изображение пластикового диска диаметром 30 см
Примечание: составлено автором.
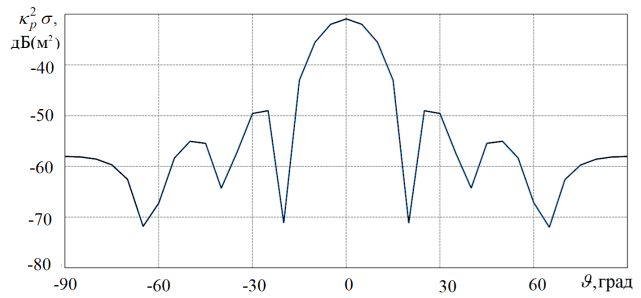
Рис. 3. Угловая зависимость пластикового диска
Примечание: составлено автором.

Рис. 4. Радиолокационные изображения пластикового диска при разном энергетическом потенциале
а) p, дБ = 136; б) p, дБ = 146
Примечание: составлено автором.
Таблица 1
Связь радиолокационного контраста с энергетическим потенциалом
|
М, дБ |
2 |
4 |
6 |
8 |
10 |
12 |
|
p, дБ |
136 |
138 |
140 |
142 |
144 |
146 |
|
Q |
1,34 |
1,82 |
2,23 |
2,73 |
2,95 |
3,11 |
Примечание: составлено автором.
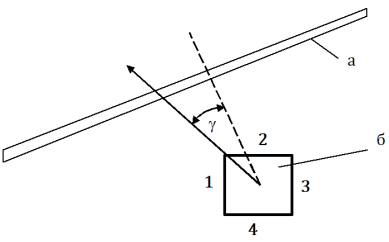
Рис. 5. Схема профилирования заглубленной в грунт трубы: а – труба; б – антенная система
Примечание: составлено автором.
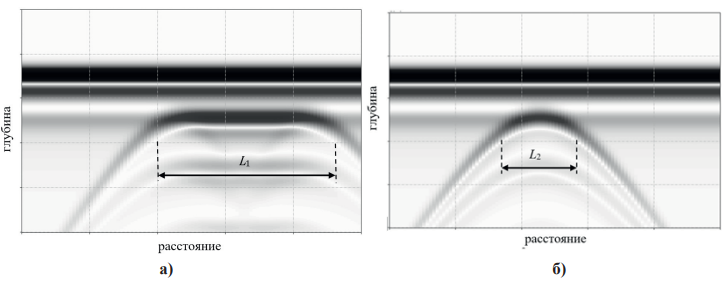
Рис. 6. Примеры георадарного профилирования заглубленной в грунт трубы: а) 1-й профиль; б) 2-й профиль
Примечание: составлено автором.
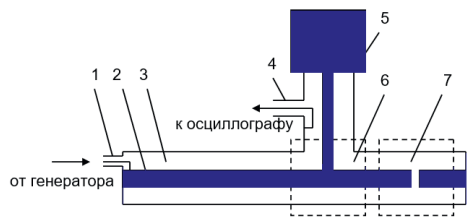
Рис. 7. Схема коаксиальной системы резонансной компрессии: 1 – петля возбуждения; 2 – внутренний проводник; 3 – внешний экран; 4 – петля индикации; 5 – согласованная нагрузка; 6 – Т-образное сочленение; 7 – емкостной зазор
Примечание: составлено по источнику [8].
Таблица 2
Параметры импульсов излучения на выходе коаксиальных компрессоров
|
Несущая частота, МГц |
Длительность импульса, нс |
Пиковая мощность, кВт |
Частота повторения, Гц |
Коэффициент усиления мощности M, дБ |
|
36,5 |
75 |
160 |
10 |
12 |
|
150 |
20 |
1600 |
500 |
22 |
|
900 |
2.5 |
100 |
1000 |
20 |
Примечание: составлено по источнику [9].
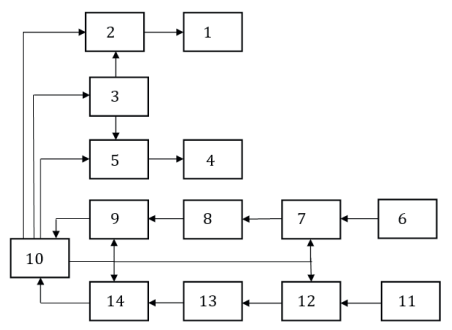
Рис. 8. Структурная схема радиолокатора подповерхностного зондирования: 1, 4 – передающие антенны; 2, 5 – коаксиальные резонансные компрессоры; 3 – генератор СВЧ импульсов; 6, 11 – приемные антенны; 7, 12 – электронные ключи; 8, 13 – высокочастотные усилители; 9, 14 – стробоскопические приемники; 10 – устройство синхронизации и управления (УСУ)
Примечание: составлено автором.
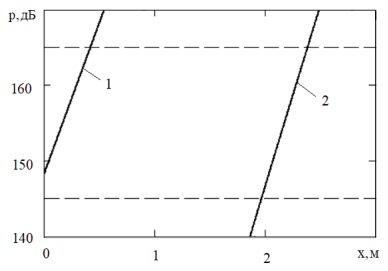
Рис. 9. Зависимость энергетического потенциала от глубины залегания пластиковой трубы
Примечание: составлено автором.
Соотношение (3) позволяет определить уменьшение мощности сигнала, рассеянного пластиковым объектом при подповерхностном радиолокационном зондировании, в сравнении с атмосферным облучением. Для пластикового диска диаметром 30 см, заглубленного в песок (рис.1), 20log kp = 27,9дБ, что соответствует результатам моделирования в FEKO (рис. 3).
Кроме уменьшения мощности в зависимости от знака диэлектрического скачка будут проявляться определенные фазовые свойства рассеянного сигнала. Когда ε1 < ε коэффициент k отрицателен, а отраженный сигнал при этом формируется в противофазе к зондирующему сигналу (рис. 10а). При ε1 > ε коэффициент k > 0 и форма отраженного сигнала будет повторять форму, которую он имел до отражения (рис. 10б).
Соотношения (7) и (8) позволяют найти радиолокационный контраст изображения пластикового диска, который будет получен путем георадарного профилирования с тем или иным значением энергетического потенциала системы. Для диска, заглубленного в песок на глубину 0,3 м, погонного затухания 10 дБ и М = 10 дБ можно получить радиолокационный контраст QL = 1,82 дБ.
Результаты измерений свидетельствуют, что увеличение энергетического потенциала георадара приводит к увеличению радиолокационного контраста изображений пластикового диска (табл. 1).
Результаты моделирования свидетельствуют, что протяженность радиолокационных изображений заглубленных труб в подповерхностной среде зависит от угла пересечения георадаром при профилировании (рис. 6).
Результаты расчета свидетельствуют (рис. 9), что резонансная компрессия зондирующих сигналов позволяет увеличить энергетический потенциал георадара до 165 дБ, что позволяет обнаружить пластиковую трубу с борта воздушного носителя и приводит к увеличению глубины радиолокационного зондирования с поверхности земли.
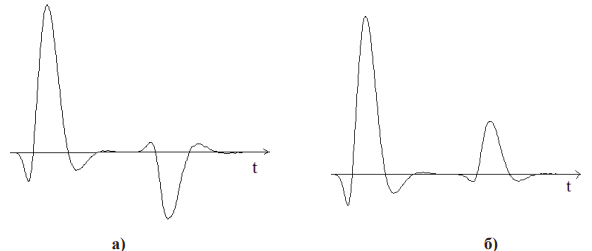
Рис. 10. Форма зондирующего и отраженного сигналов а) ε1 < ε; б) ε1 > ε
Примечание: составлено автором.
Обнаружение пластиковых объектов методом подповерхностного радиолокационного зондирования зависит от диэлектрического скачка на границе объект – укрывающая среда. В отсутствии диэлектрического скачка обнаружение пластикового объекта становится невозможным.
Радиолокационный контраст изображения пластиковых объектов напрямую связан с энергетическим потенциалом георадара, глубиной залегания и погонным затуханием в подповерхностной среде.
Протяженность радиолокационных изображений заглубленных труб в подповерхностной среде зависит от угла пересечения георадаром при профилировании. Подповерхностное радиолокационное зондирование с помощью излучателей Вивальди позволяет облучать заглубленную трубу поляризационно-модулированными сигналами и измерять ориентацию трубы в подповерхностной среде.
Радиолокатор подповерхностного зондирования с резонансной коаксиальной компрессией сигналов обладает энергетическим потенциалом в 155…165 дБ и способен обнаруживать пластиковые объекты с поверхности земли и с борта воздушного носителя.
1. Александров П. Н. Теоретические основы георадарного метода : моногр. М. : Физматлит, 2017. 112 с.
2. Jol H. M., editor. Ground Penetrating Radar: Theory and Applications. 1st ed. Amsterdam : Elsevier Science, 2009. 544 p.
3. Финкельштейн М. И., Карпухин В. И., Кутев В. А. и др. Подповерхностная радиолокация. М. : Радио и связь, 1994. 216 с.
4. Вопросы подповерхностной радиолокации : моногр. / отв. ред. А. Ю. Гринев. М. : Радиотехника, 2005. 413 c.
5. Шошин Е. Л. Исследование характеристик антенны Вивальди // Приборы и техника эксперимента. 2022. № 3. С. 152–158.
6. Warren C., Giannopoulos A., Giannakis I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar // Computer Physics Communications. 2016. No. 209. P. 163–170.
7. Шошин Е. Л. Измерение эффективной поверхности рассеяния локальных объектов радиолокатором под- поверхностного зондирования // Журнал радиоэлектроники. 2022. № 11. https://doi.org/10.30898/1684-1719.2022.11.8.
8. Артеменко С. Н., Новиков С. А., Юшков Ю. Г. Коаксиальные резонаторы в компрессорах СВЧ импульсов // Известия Томского политехнического университета. 2009. Т. 314, № 4. С. 127–131.
9. Чумерин П. Ю., Юшков Ю. Г. Подповерхностный радиолокатор с резонансной компрессией излученных сигналов // Радиолокация, навигация, связь: материалы Междунар. науч.-технич. конф., 14–16 апреля 2015 г., г. Воронеж. Воронеж : НПФ «Саквоее», 2015. Т. 2. С. 546–552.
кандидат технических наук, доцент
Шошин Е.Л. Подповерхностное радиолокационное зондирование пластиковых объектов. Вестник кибернетики. 2024;23(4):83–91. https://doi.org/10.35266/1999-7604-2024-4-8
Shoshin E.L. Subsurface radar sensing of plastic objects. Proceedings in Cybernetics. 2024;23(4):83–91. (In Russ.) https://doi.org/10.35266/1999-7604-2024-4-8
628412, Ханты-Мансийский автономный округ – Югра,
г. Сургут, пр. Ленина, 1.
БУ ВО ХМАО-Югры «Сургутский государственный университет»
Email: science.jоurnals@surgu.ru











