



Содержание
Перейти к:
https://doi.org/10.35266/1999-7604-2025-2-1
Перейти к:
В работе показано, что наибольшей результативностью мониторинга обстановки в протяженных районах выполнения задач обладают многоцелевые комплексы на базе беспилотных летательных аппаратов типа «Грант-М», «Орлан‑10», «Феникс», «ВТ‑30 Е, –45, –440» «Рапира», у которых источником питания аппаратуры полезной нагрузки служат аккумуляторные батареи со стабилизаторами напряжений МДМ-Р. На основе летных исследовательских экспериментов выявлена низкая эффективность вторичных источников питания и обоснована актуальность улучшения энергообеспечения целевых нагрузок беспилотных авиационных систем. Установлены причины разряда бортовых аккумуляторных батарей с модульными преобразователями напряжений. Проведены измерения величин токов утечки (потребления) и коэффициента полезного действия на холостом ходу в зависимости от входного напряжения. Разработана схема устройства контроля питающих токов и напряжений на основе 8‑битного микроконтроллера ATmega32U4. Выбор чипа обусловлен возможностью перепрограммирования области его программной памяти внутрисистемно через последовательный SPI интерфейс стандартным программатором. Рассмотрена принципиальная схема включения микроконтроллера по протоколам I 2C и SPI. На языке Rust создано программное обеспечение для поддержки работы с различными классами и объектами C++, что позволило организовать прием и передачу информации о контролируемых токах и напряжениях полезной нагрузки беспилотного летательного аппарата по каналу связи на наземный пункт управления.
С применением современных схемотехнических решений в цепях электропитания предложена схема маломощного преобразователя напряжения на базе коммутатора и подготовлена циклограмма его работы. Применение разработанного маломощного преобразователя позволяет снизить потребляемую мощность в дежурном режиме до 50 раз.
Богословский А.В., Разиньков С.Н., Сёмка Э.В., Буслаев А.Б. Повышение эффективности энергообеспечения целевых нагрузок беспилотных авиационных систем при управлении вторичными источниками питания. Вестник кибернетики. 2025;24(2):6-13. https://doi.org/10.35266/1999-7604-2025-2-1
Bogoslovsky A.V., Razinkov S.N., Syomka E.V., Buslaev A.B. Efficiency improvement of power supply for target loads of unmanned aerial systems during secondary power sources control. Proceedings in Cybernetics. 2025;24(2):6-13. (In Russ.) https://doi.org/10.35266/1999-7604-2025-2-1
Применение беспилотных систем играет решающую роль в завоевании превосходства в воздухе. Наибольшей эффективностью мониторинга обстановки в протяженных районах выполнения задач обладают комплексы на базе беспилотных летательных аппаратов (БЛА). Их основное преимущество заключается в способности длительного пребывания в воздухе с оперативным переносом усилий в заданные позиционные районы (на угрожаемые направления) [1–6].
Анализ специфики эксплуатации БЛА самолетного типа «Грант-М» (ООО «НПКЦ «НОВИК-91»), «Орлан-10» (ООО «СТЦ») и «Феникс» (ООО «НПП «НТТ»), беспилотных вертолетных систем «ВТ-30 Е, -45, -440» и комплекса летающее крыло «Рапира» (АО «НПП «Радар ммс») в полевых условиях показал (рис. 1), что этап подключения целевой нагрузки к первичному источнику бортового электропитания – генератору занимает длительное время и зачастую приводит к выводу из строя дорогостоящей аппаратуры. Поэтому целевые нагрузки с аккумуляторными батареями (АКБ), выступающими в роли вторичных источников электропитания, размещаются в транспортных отсеках, что позволяет оперативно менять состав систем сбора данных в зависимости от обстановки и выполняемых задач [7–9].

Рис. 1. Образцы БЛА: а) «Грант-М»; б) «Орлан-10»; в) «Феникс»; г) БВС ВТ-45; д) «Рапира»
Примечание: составлено авторами на основании данных, полученных в исследовании.
Для стабилизации напряжения в представленных БЛА могут применяться блоки IV поколения МДМ-Р (рис. 2), являющиеся ультракомпактными преобразователями с высокой энергетической плотностью до 6 КВт/дм³. Однако при их практической эксплуатации регистрируются высокие уровни токов утечки и нагрев, обусловленные топологией модульного исполнения. В результате происходит разряд АКБ в полете, что существенно сокращает время работы полезной нагрузки по назначению.
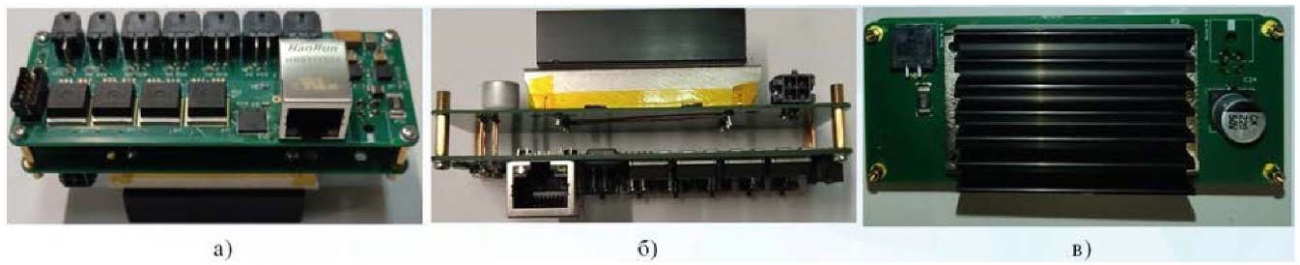
Рис. 2. Внешний вид МДМ-Р: а) со стороны компонентов; б) со стороны разъемов подключения; в) вид снизу
Примечание: составлено авторами.
Проведенная серия летных исследовательских экспериментов показала, что АКБ БЛА «Грант-М» с подключенной бортовой малогабаритной РЛС «Квазар» мощность 1 Вт по прибытии в район мониторинга обстановки в большинстве случаев полностью разряжалась [10–11]. Поэтому исследования, связанные с повышением автономности беспилотных комплексов за счет применения современных схемотехнических решений в цепях электропитания, являются актуальными.
Цель работы – разработка электрической схемы маломощного преобразователя напряжения, позволяющей повысить эффективность энергообеспечения целевых нагрузок комплексов на беспилотных летательных аппаратах.
Исследование величин токов утечки. Совместно с отечественным разработчиком модульных преобразователей и систем электропитания произведены измерения величин потребления тока на холостом ходу (ХХ) в зависимости от входного напряжения. Результаты представлены в табл. 1.
Таблица 1
Значения потребляемого тока на холостом ходу
Uвх, В | I потребления, А |
15 | 0,372 |
22 | 0,312 |
Примечание: составлено авторами.
Установлено, что при входном напряжении 15…22 В ток потребления составляет 0,312…0,372 А.
На рис. 3 показаны найденные зависимости коэффициента полезного действия (КПД) модуля МДМ-Р от величины входного напряжения.
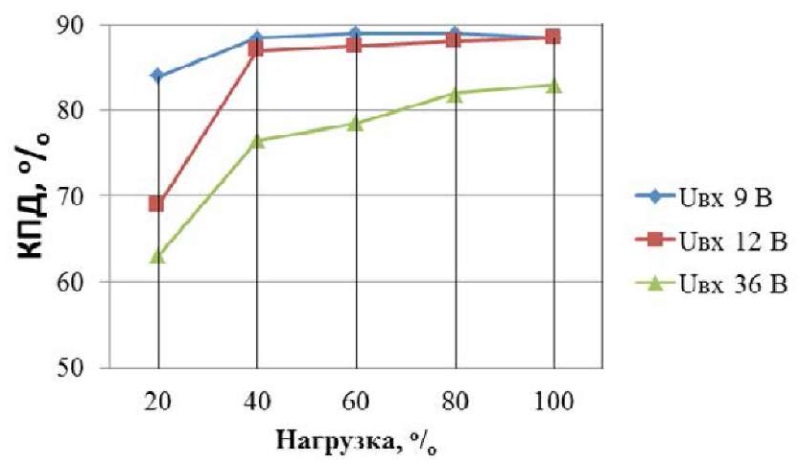
Рис. 3. Измеренные значения КПД модуля МДМ-Р
Примечание: составлено авторами на основании данных, полученных в исследовании.
Отмечаются высокие значения КПД – порядка 85…90 % в диапазоне 40…100 % нагрузки.
Измеренные потребление и нагрев для МДМ-Р являются следствием конфигурации компонентов схемы. Прямоходовой преобразователь, с синхронным выпрямлением, содержащий МОП-транзисторы в выходном каскаде, позволяет достигать высокого КПД в широком диапазоне нагрузки, но на ХХ вызывает повышенный расход из-за самоподгрузки.
Управление бортовым электропитанием. Для организации управления бортовой полезной нагрузки, установленной на БЛА «Грант-М», применяется канал связи, структурная схема которой приведена на рис. 4.
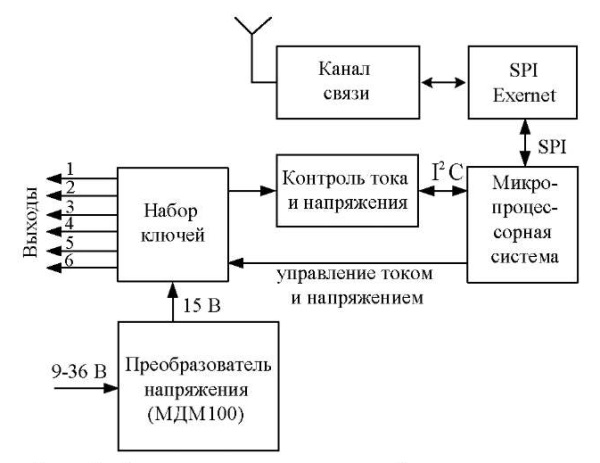
Рис. 4. Структурная схема устройства контроля питающих токов и напряжений
Примечание: составлено авторами.
Основными элементами структурной схемы управления являются радиомодем дециметровых волн и антенный модуль, образующие канал связи. По каналу управления осуществляется контроль потребляемых напряжений и токов.
Для передачи информации побитно с фиксированными интервалами времени используются последовательные интерфейсы SPI и I²C. Их особенность состоит в том, что протокол SPI использует четыре сигнальные линии для связи между частями, а протокол I²C – две.
По шине SPI (линий SCLK, MOSI, MISO, ) применяется одно управляющее устройство (MASTER), а количество периферийных устройств может быть неограниченно. Скорость передачи данных превышает 10 Мбит/с, что способствует трансляции больших объемов информации. Протокол I²C (линий SCL, SDA) может задействовать несколько мастеров на одной шине.
Для реализации вышеперечисленных протоколов в модуле управления питанием используется 8-битный микроконтроллер ATmega32U4 [12], произведенный по технологии энергонезависимой памяти высокой плотности, а встроенная ISP FLASH-память позволяет перепрограммировать область программной памяти внутрисистемно через последовательный SPI интерфейс стандартным программатором. Микроконтроллер ATmega32U4 потребляет небольшой объем энергии в связи с возможностью быстрого перехода в нормальный режим работы из режима ожидания, имеет высокую гибкость и экономическую эффективность во встраиваемых системах управления.
Принципиальная схема включения микроконтроллера представлена на рис. 5а, где передача данных по протоколу I²C осуществляется на выводах 18, 19, а по протоколу SPI – на выводах 9, 10, 11, 28. С помощью выводов 22, 25, 21, 29, 30 и 12 осуществляется выбор источников, с которыми осуществляется обмен данными по определению номера канала и значений токов и напряжений в нем.
Программное обеспечение для микроконтроллера разрабатывалось на языке Rust, что позволяло генерировать оболочки для работы с различными классами и объектами C++. Фрагмент программы инициализации периферии, обеспечивающей обмен данными по протоколам SPI и I²C, представлен на рис. 5б.
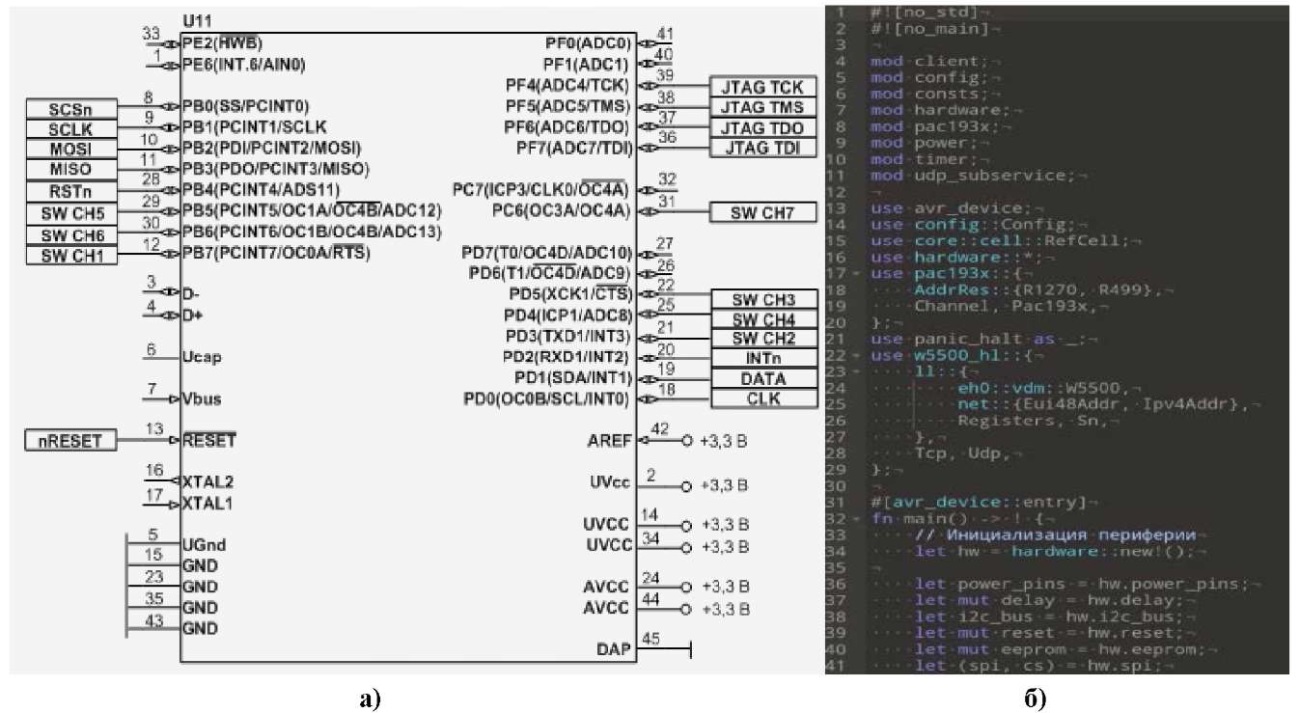
Рис. 5. Организация управления по интерфейсу SPI и I²C: а) схема включения ATmega32U4; б) программа инициализации
Примечание: составлено авторами.
Применение микроконтроллера ATmega 32U4 обеспечивает прием и передачу информации о контролируемых токах и напряжениях полезной нагрузки БЛА по каналу связи на наземный пункт управления.
Маломощный преобразователь напряжения. Для снижения расхода мощности на ХХ предложено подключить к штатному преобразователю МДМ-Р маломощный преобразователь напряжения (МПН), а переключение между ними организовать с помощью транзисторов, которыми управляет устройство управления (УУ), представляющее собой электронный коммутатор (таймер), потребляющий незначительный ток от штатного преобразователя напряжений или от МПН, которые одновременно выключенными не могут быть, как показано на рис. 6б. В принципе в качестве ключей вместо транзисторов VT1, VT2 (рис. 6б) могут быть использованы специализированные мощные ключевые элементы.
Маломощный преобразователь напряжения содержит автогенератор с трансформаторной обратной связью, выпрямитель для получения напряжения 15 В и стабилизатор напряжения через оптопару (рис. 6а).
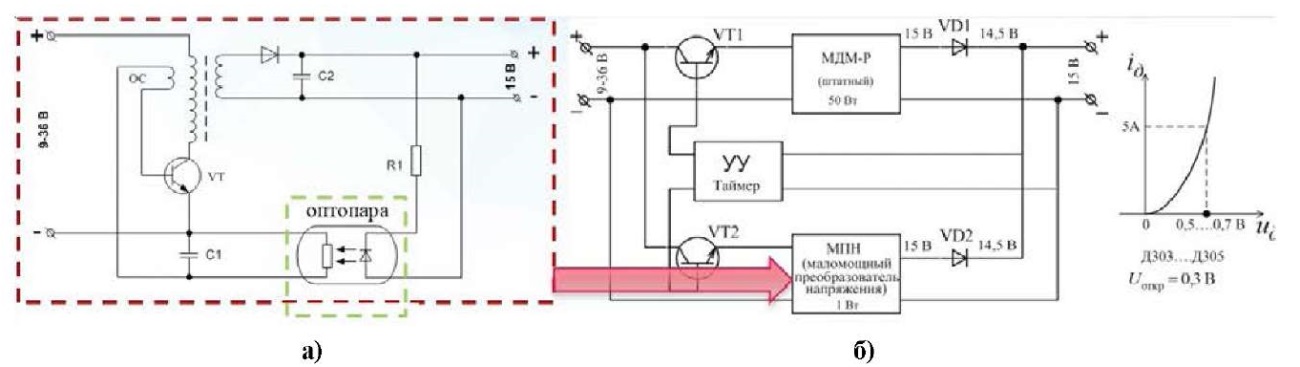
Рис. 6. Применение МПН: а) принципиальная схема МПН; б) функциональная схема коммутации источников питания
Примечание: составлено авторами.
Цепь обратной связи функционирует в двух режимах:
– при отсутствии нагрузки напряжение повышается, светодиод оптопары светится ярче, напряжение на фоторезисторе оптопары повышается и запирает транзистор;
– при подключении нагрузки напряжение уменьшается, светодиод оптопары светится слабее, следовательно, на фоторезисторе оптопары напряжение уменьшается, транзистор открывается, и выходное напряжение увеличивается до 15 В.
На диодах Д303…Д305 падение напряжения составит с 15 до 14,5 В, как показано в правой части рис. 6.
Маломощный преобразователь необходим для поддержания в первоначальное время значений 15 В. При отключении основного преобразователя напряжения потребление тока маломощным преобразователем будет порядка 10–15 мА для сохранения 15 В дежурного режима.
Циклограмма управления таймером переключения преобразователей напряжения приведена на рис. 7.
Время на включение МДМ-Р и выключение МПН составляет Δt = 0,5…1 c.
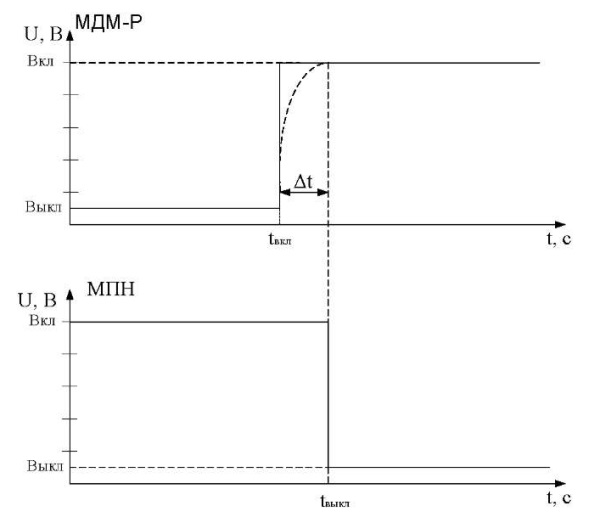
Рис. 7. Циклограмма работы УУ
Примечание: составлено авторами.
Применение маломощного преобразователя с устройством управления в виде электронного коммутатора позволит повысить энергообеспечение БЛА в 50 раз, что увеличит время воздушной разведки и объем информационного обеспечения.
1. Антонов Д. А. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра : моногр. / под ред. Е. А. Федосова. М. : Дрофа, 2005. 732 с.
2. Переверзев А. Л., Разинькова О. Э., Тимошенко А. В. Перспективы применения малозаметных беспилотных радиотехнических комплексов в интересах разведки и контроля воздушного пространства // Вестник воздушно-космической обороны. 2020. № 4. С. 42–46.
3. Белов С. Г., Верба В. С., Глаголев В. А. Комплексы с беспилотными летательными аппаратами. Кн. 2. : моногр. / под ред. В. С. Вербы, Б. Г. Татарского. М. : Радиотехника, 2016. 824 с.
4. Веремеенко К. К., Головинский А. Н., Инсаров В. В. и др. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий / под ред. М. Н. Красильщикова, Г. Г. Себрякова. М. : Наука, 2003. 280 с.
5. Моисеев В. С. Прикладная теория управления беспилотными летательными аппаратами : моногр. Казань : Республиканский центр мониторинга качества образования, 2013. 768 с.
6. Пономарев А. А., Межуев М. В., Дмитриев С. А. Оптимизация маршрута летательного аппарата,
7. определяющего местоположение цели по ее угловым координатам // Успехи современной радиоэлектроники. 2012. С. 18–22.
8. Донсков Ю. Е., Богословский А. В., Матвеев Д. С. Способы применения беспилотных летательных аппаратов радиотехнической разведки в ходе ведения боевых действий в тактической зоне // Военная мысль. 2021. № 8. С. 64–70.
9. Богословский А. В., Разиньков С. Н., Сёмка Э. В. Обоснование электронной компонентной базы для автогенераторов при навигационном обеспечении беспилотных летательных аппаратов // Вестник кибернетики. 2023. Т. 22, № 1. С. 6–15. https://doi.org/10.35266/1999-7604-2023-1-6-15.
10. Богословский А. В., Разиньков С. Н., Разинькова О. Э. Дальность обнаружения воздушных объектов широкополосными системами активно-пассивной радиолокации // Антенны. 2023. № 2. С. 32–43.
11. Разиньков С. Н., Богословский А. В., Гордиенко С. А. Экспериментальное определение местоположения источников радиоизлучений с применением высокомобильного цифрового обнаружителя-пеленгатора // Вестник Рязанского государственного радиотехнического университета. 2022. № 81. С. 21–31.
12. Богословский А. В., Разиньков С. Н., Сёмка Э. В. и др. Применение программируемых логических интегральных схем в системах многоканальной цифровой обработки сигналов спутниковой навигации // Вестник кибернетики. 2023. Т. 22, № 2. С. 13–20. https://doi.org/10.35266/1999-7604-2023-2-13-20.
13. Преобразователь МДМ100-Р. URL: https://aedon.ru/catalog/dcdc/models/89 (дата обращения: 04.11.2024).
кандидат технических наук, доцент, заместитель начальника кафедры радиоэлектроники
доктор физико-математических наук, профессор, доцент
кандидат физико-математических наук, доцент
кандидат технических наук, доцент
Богословский А.В., Разиньков С.Н., Сёмка Э.В., Буслаев А.Б. Повышение эффективности энергообеспечения целевых нагрузок беспилотных авиационных систем при управлении вторичными источниками питания. Вестник кибернетики. 2025;24(2):6-13. https://doi.org/10.35266/1999-7604-2025-2-1
Bogoslovsky A.V., Razinkov S.N., Syomka E.V., Buslaev A.B. Efficiency improvement of power supply for target loads of unmanned aerial systems during secondary power sources control. Proceedings in Cybernetics. 2025;24(2):6-13. (In Russ.) https://doi.org/10.35266/1999-7604-2025-2-1
628412, Ханты-Мансийский автономный округ – Югра,
г. Сургут, пр. Ленина, 1.
БУ ВО ХМАО-Югры «Сургутский государственный университет»
Email: science.jоurnals@surgu.ru











